can总线控制器的原理(can控制器的工作原理)
can总线控制器的原理(can控制器的工作原理)
内容概要:
• CAN 总线工作原理
• CAN 总线主要特点
• CAN 总线拓扑结构
• CAN 总线应用领域
CAN(Controller Area Network)是 ISO 国际标准化的串行通信协议。早期源于汽车行业对安全性、舒适性、低成本等要求,各种各样的电子控制系统被开发了出来。各系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。
为"减少线束的数量,通过多个LAN进行大量数据的高速通信"的需要,1986 年德国电气商Bosch 公司开发出面向汽车的CAN 通信协议。此后CAN 通过 ISO11898 及 ISO11519 进行了标准化。
CAN 总线的工作原理
CAN 总线使用串行数据传输方式,且总线协议支持多主控制器。当CAN 总线上的一个节点(站)发送数据时,它以报文形式广播给网络中所有节点。
每组报文开头的11位字符为标识符,定义了报文的优先级,这种报文格式称为面向内容的编址方案。在同一系统中标识符是唯一的,不可能有两个站发送具有相同标识符的报文。当几个站同时竞争总线读取时,这种配置十分重要。
当一个站要向
其它
站发送数据时,该站的CPU 将要发送的数据和自己的标识符传送给本站的CAN 芯片,并处于准备状态;当它收到总线分配时,转为发送报文状态。
CAN 芯片将数据根据协议组织成一定的报文格式发出,这时网上的
其它
站处于接收状态。每个处于接收状态的站对接收到的报文进行检测,判断这些报文是否是发给自己的,以确定是否接收它。
CAN 的主要特点
1、 数据通信没有主从之分,任意一个节点可以向任何其他(一个或多个)节点发起数据通信,靠各个节点信息优先级先后顺序来决定通信次序。
2、 支持时间触发通信功能, 发送报文的优先级可软件配置。多个节点同时发起通信时,优先级低的避让优先级高的,不会对通信线路造成拥塞。
3、 CAN 是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维。通信距离最远可达10KM(速率低于5Kbps),速率可达到1Mbps(通信距离小于40M)。
4、 CAN 总线采用了多主竞争式总线结构,具有多主站运行和分散仲裁的串行总线以及广播通信的特点。
5、 FIFO(First Input First Output),即先进先出队列,溢出处理方式可配置。
......
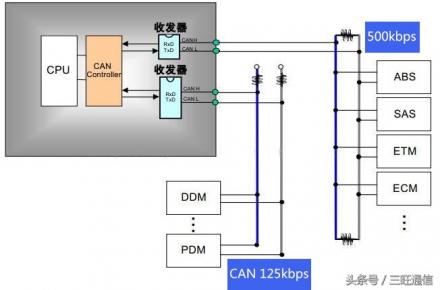
CAN总线的拓扑结构
CAN应用领域
CAN总线适用于大数据量短距离通信或者长距离小数据量,实时性要求比较高,适合多主多从或者各个节点平等的现场中使用。目前被广泛应用于工业自动化、船舶、医疗设备、工业设备等行业领域。

现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。
如果您有更多关于 CAN 总线的知识要补充,欢迎留言交流!